
The 2014 FRC game "Aerial Assist" was played by scoreing yoga balls into your choice of two different goals: 1) The High goal which was about seven feet in the air required robots to launch balls from the ground to the goal to earn points 2) the low goal whch was level with the playing field and earned a lower denomination of points. Our robot "Alice" focused on scoring in the low goal and passing balls to alliance partners earning a point multiplier.

The 2015 FRC game "Recycle Rush" required teams to stack plastic shipping totes on scoring platforms in stacks. The more totes in each stack the more points you earn and if you placed a trashcan on top of the stack it acted as a point multiplier. Our robot was able to push stacks of totes to the scoring platforms and a later version at our second compotition was able to stack totes five high.

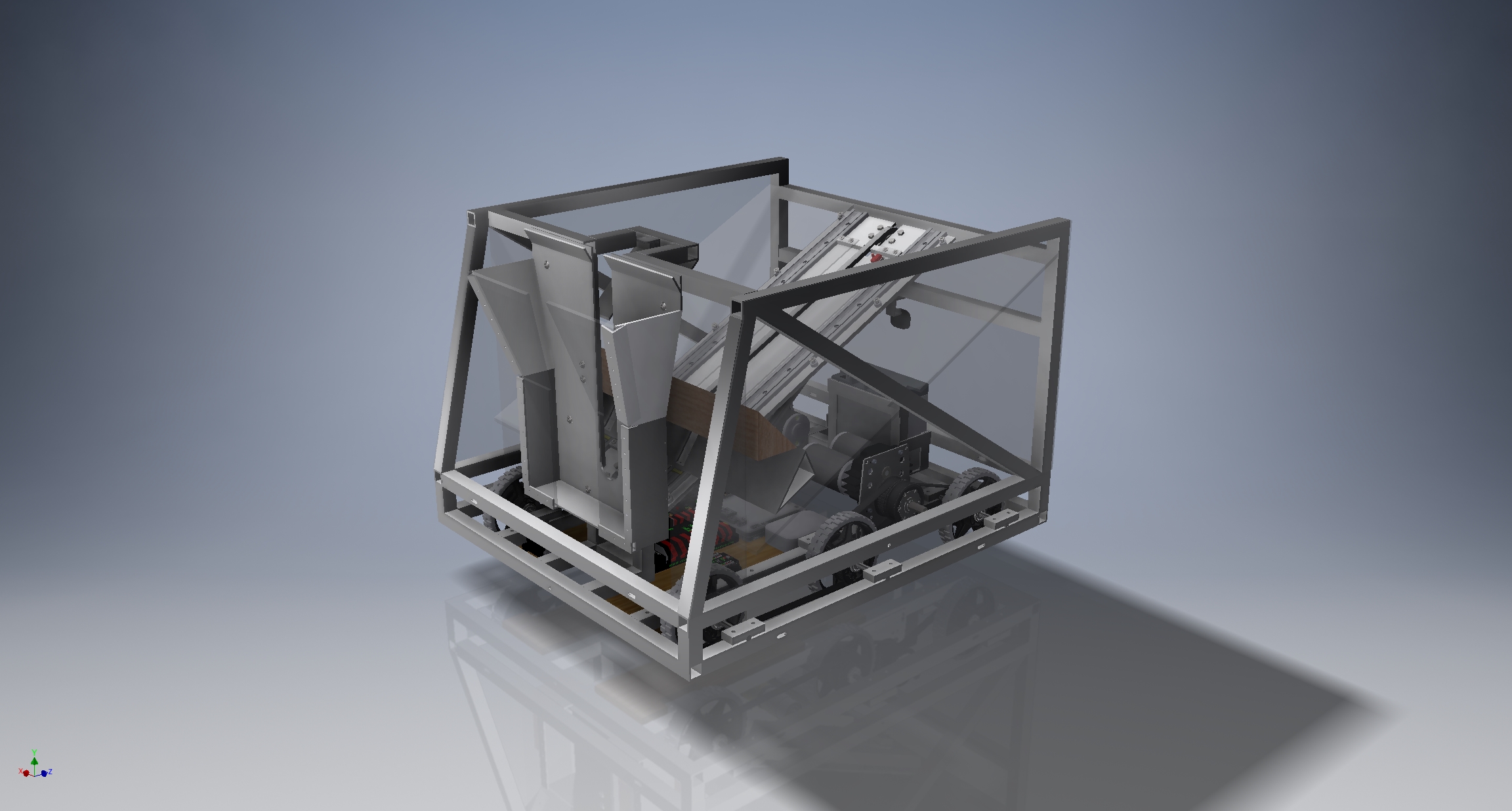
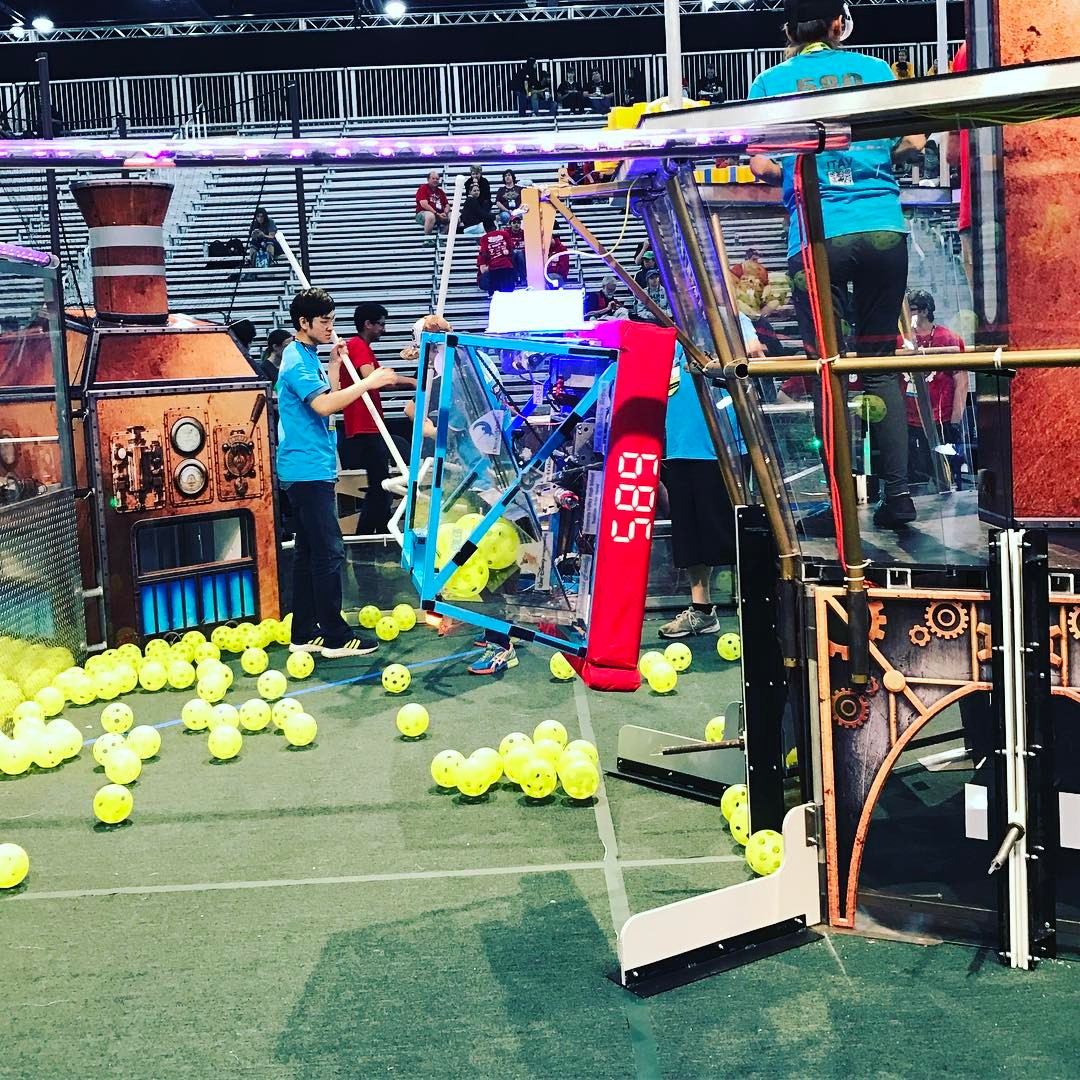
The 2016 FRC game "Stronghold" required teams to navigate a variety of medieval themed obstacles to score balls in aither a low or high goal. The high goal had a higher point value than the low goal and points were awarded for breaching defenses. Our robot was designed to navigate all the obstacles presented while transporting a ball to be score in the low goal. Our robot succeded at both competitions earning most of its points by crossing obstacles.

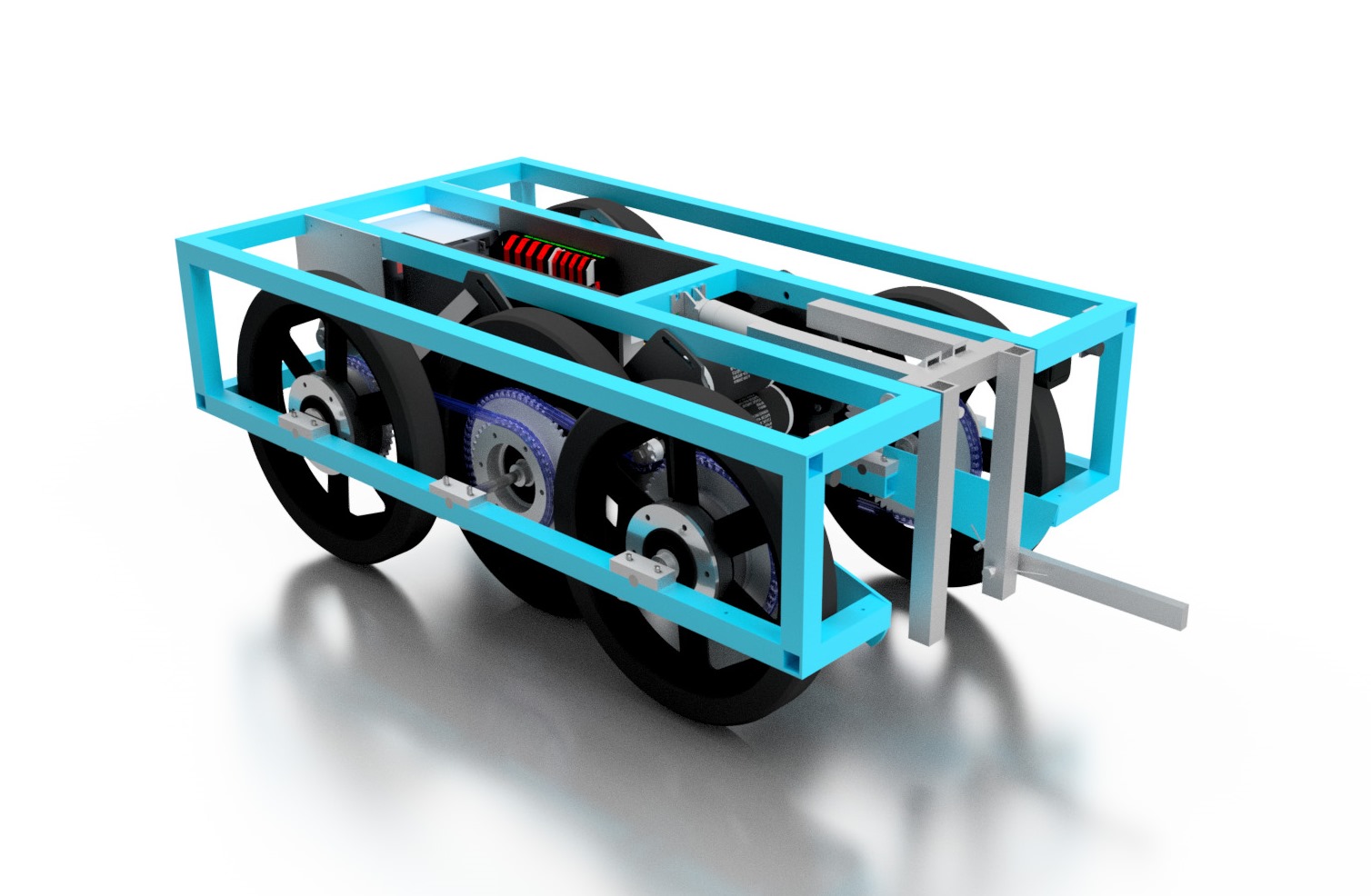
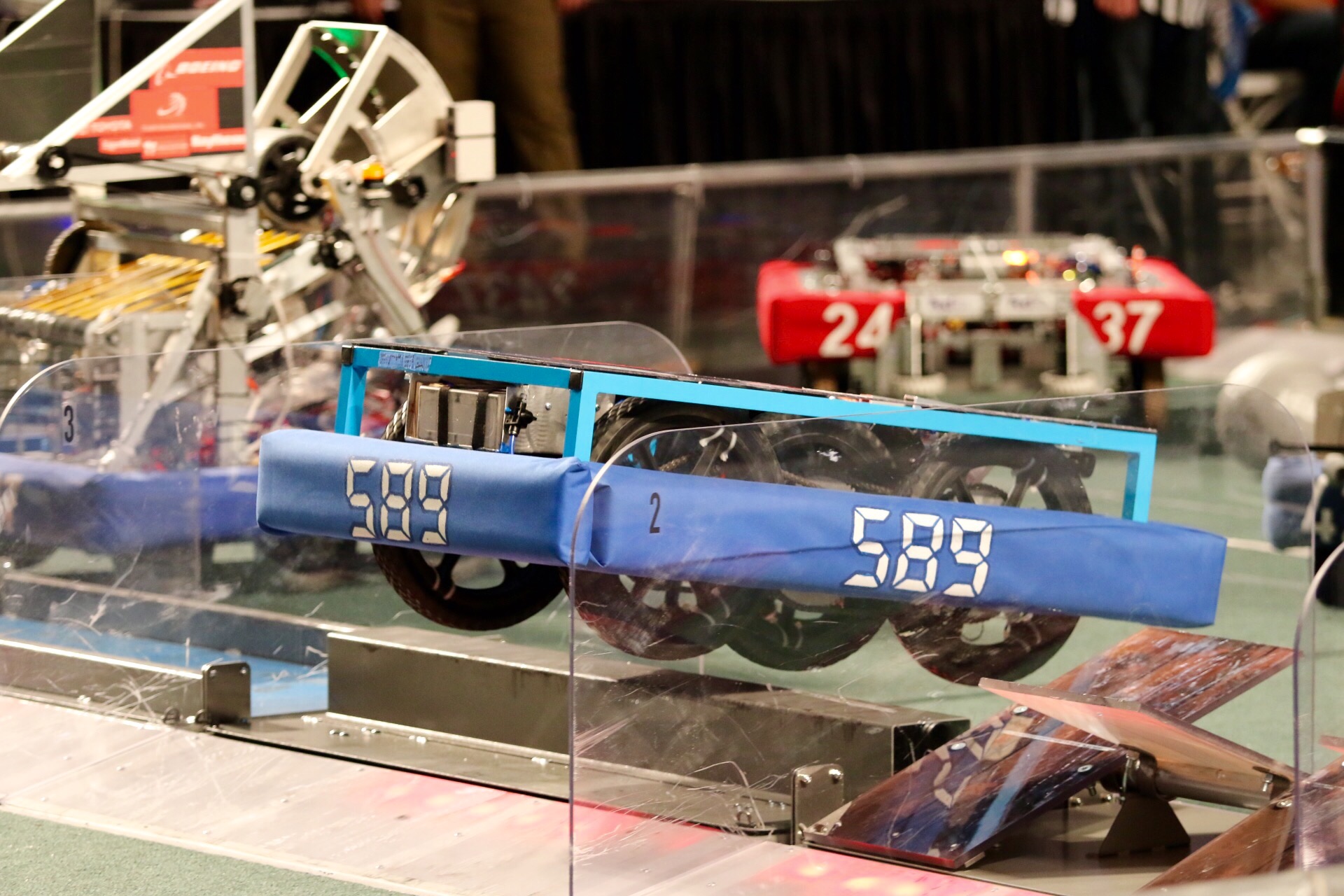
The 2017 FRC game "FIRST Steamworks" required teams to work together to bring gears to a platform in the middle of the field and take wiffle balls to a seperate scoring platform to earn points. Our robot was designed to deliver both wiffle balls and gears to their respective scoring stations, however, during competition we realized it was better for us to focus on just gears as we were not earning as many points as predicted scoring balls.

The goal of the 2013 JPL Invention Challenge was to get a galf ball into a hole at the top of a small pyramid the fastest. The catch is that you only get one shot so your device must be repeatable. Thats why we literally thought outside the box by exploiting the fact hat there were noo rules restricting your device to its starting shape throughout the duration of your turn. We decided to make a series of drawers inside one another so that we could extend all the way to the target and be able to aim our device allowing us to maintain high success rates.

The goal of the 2014 Invention Challenge was to move a billiard ball 5 meters using three different sources of power, the team whos device was closest to a total runtime of 20 seconds would win. Your score was the absolute value of the difference between 20 seconds and your devices run time. Our device started with a bungee firing pin mechanism that acted like a pool que pushing the ball down the first section of track. The second power source was gravity which we utiliized with a 2 foot drop in the track. The third was a conveyor belt that had a processor attached to determine how fast the conveyor needed to move so that we would get exactly 20 seconds + or - human error.
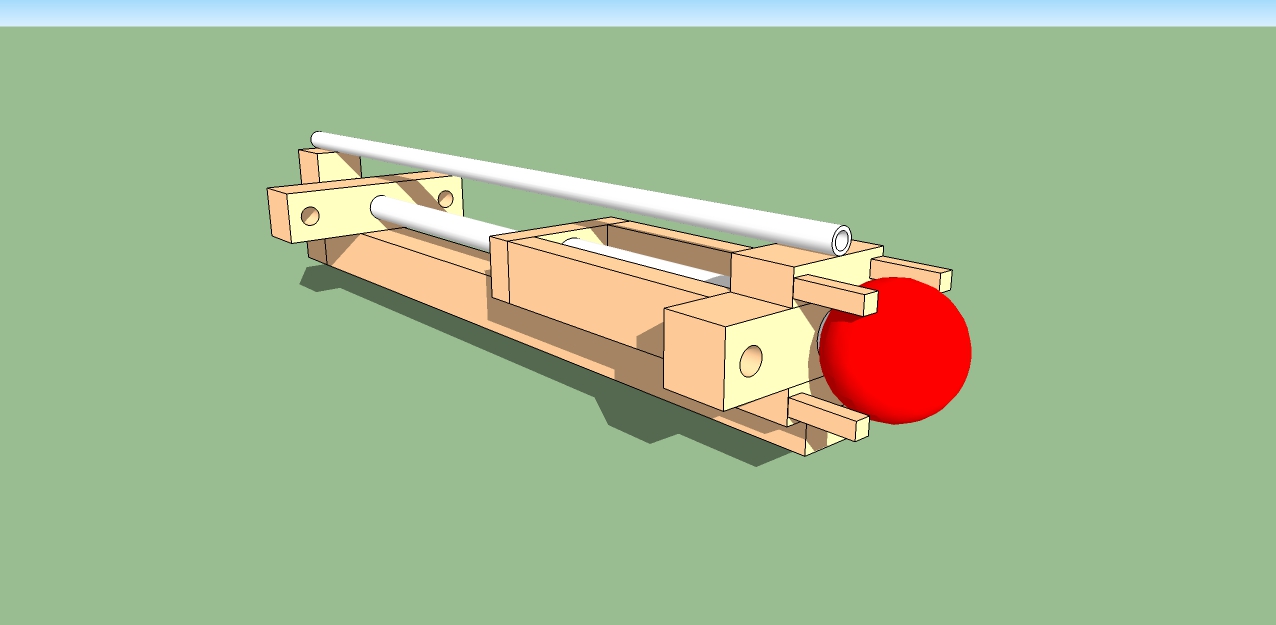
In honor of the 18th annnuel JPL Invention Challenge teams had to launch dodgeballs at a target shaped like a number 18 birthday candle. Our device retained the ball with four pieces of wood and then launched the bal by ramming it with PVC pipe actuated by bungee.

The 2016 Invention Challenge was to move a cup of water 3 meters and pour it into a different vessel without spilling, the team with the fastest time wins. Our device used bungee and a rolling trolley to pickup and carry the cup then dump it into a large funnel placed over the final vessel.
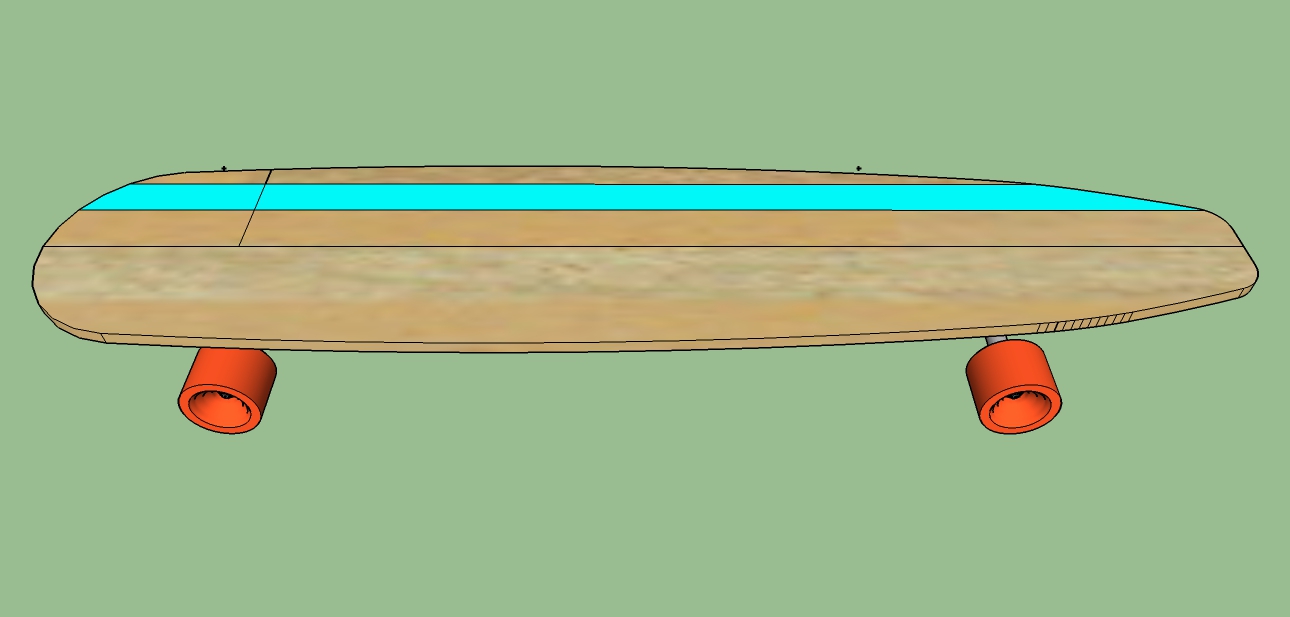

This is a skateboard I was tasked to design and fabricate as a final project for engineering class. It is based on a traditional longboard surfboard shape.
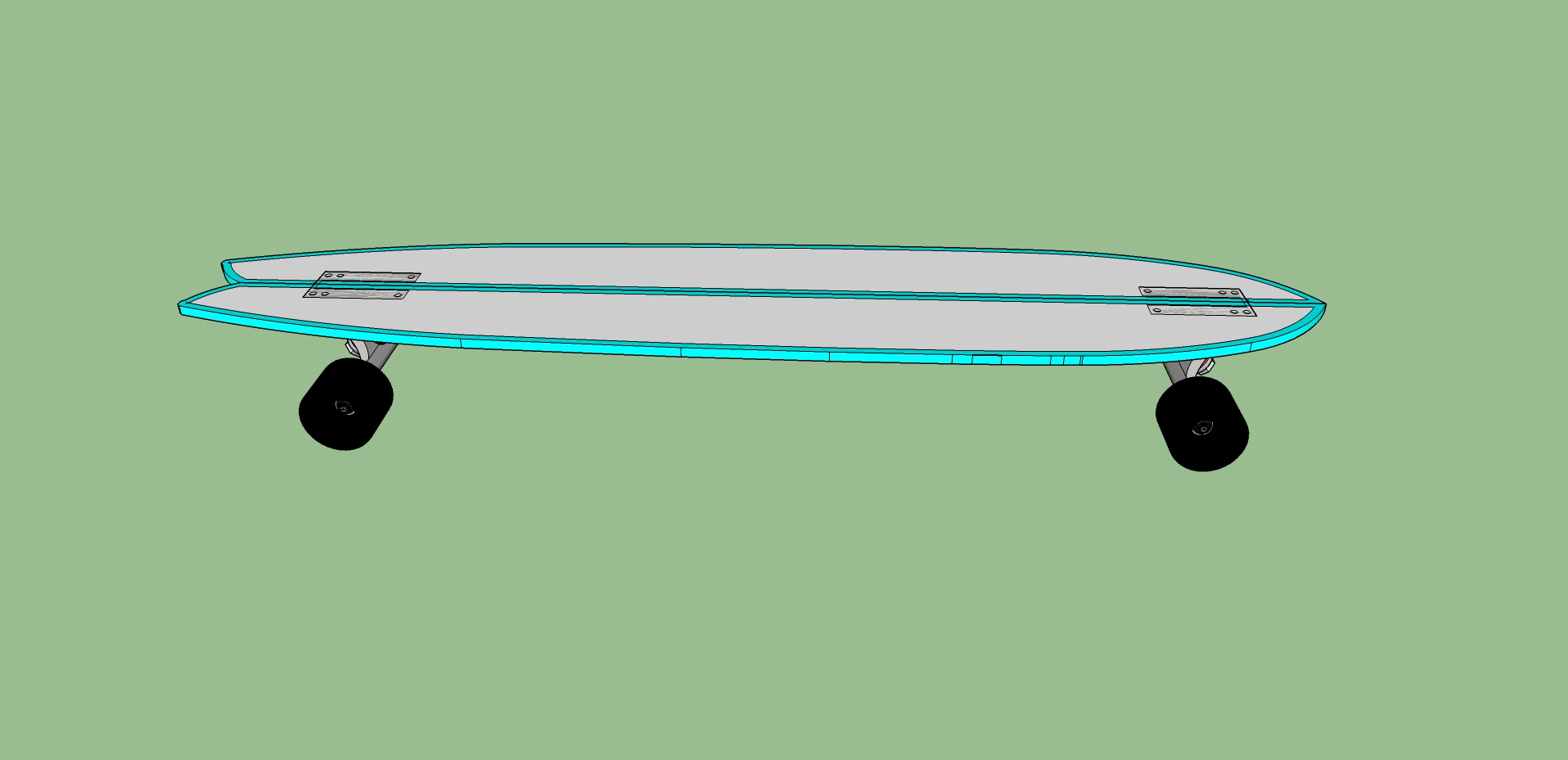
This was my final project for engineering class. It is designed after a fish style surfboard as to keep with my theme of making skateboards that look like surfboards.